






موتور گیربکس دار 12 ولت 100 دور ZGA25
موتور DC گیربکسدار ZGA25 یک موتورگیربکس DC به همراه یک گیربکس می باشد که با هدف کاهش سرعت و افزایش قدرت و گشتاور به کار گرفته می شود. این کار توسط چرخ دنده های گیربکس که داخل جعبه دنده هستند صورت می گیرد(موتوررباتیک).
کیفیت ساخت موتور DC
چرخ دنده های استفاده شده در گیربکس به طور مستقیم بر روی کیفیت و قدرت موتور تاثیر می گذارد، به همین منظور شرکت ژنگ از بهترین متریال در ساخت گیربکس استفاده می کند.
این موتور گیربکس محصولی از کمپانی ژنگ می باشد و دارای کیفیت و عملکرد بالایی می باشد.
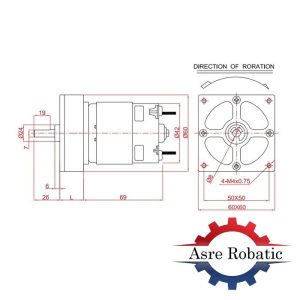
الکترونیک این موتور دی سی دارای دو پین ورودی می باشد که کنار یکی از پین ها نقطه قرمز رنگی قرار دارد. این پایه پایه مثبت و پایه دیگر منفی می باشد. در صورت اتصال پایه ها به ترتیبی که گفته شده موتور در جهت ساعتگرد شروع به چرخیدن می کند و در صورت اتصال پایه ها به صورت برعکس جهت چرخش موتور عوض می شود.
کاربرد موتور گیربکس دار
- رباتیک (ربات های مازخط، جنجگوی سبک، ربات آتشنشان و … )
- درب گاو صندوق
- پنجره های ضد سرقت
- پرده کرکرهی برقی
- تجهیزات پزشکی و آزمایشگاهی
- تجهیزات ورزشی و تفریحی
- ربات دانش آموزی
- وغیره….
















0دیدگاه